
Choose from high-performance educational humanoids built for hands-on learning. Compact builds, powerful 8-core CPUs, and up to 100 TOPS of computing power make them ideal for secondary development and live demonstrations.
LIVOX-MID360
Shoulder: 3 | Elbow: 2 | Wrist: 2
Max Torque: 120 N.m
Intel Realsense D435
Provides lasting power
No external cables
Hip: 3 | Knee: 2 | Ankle: 2
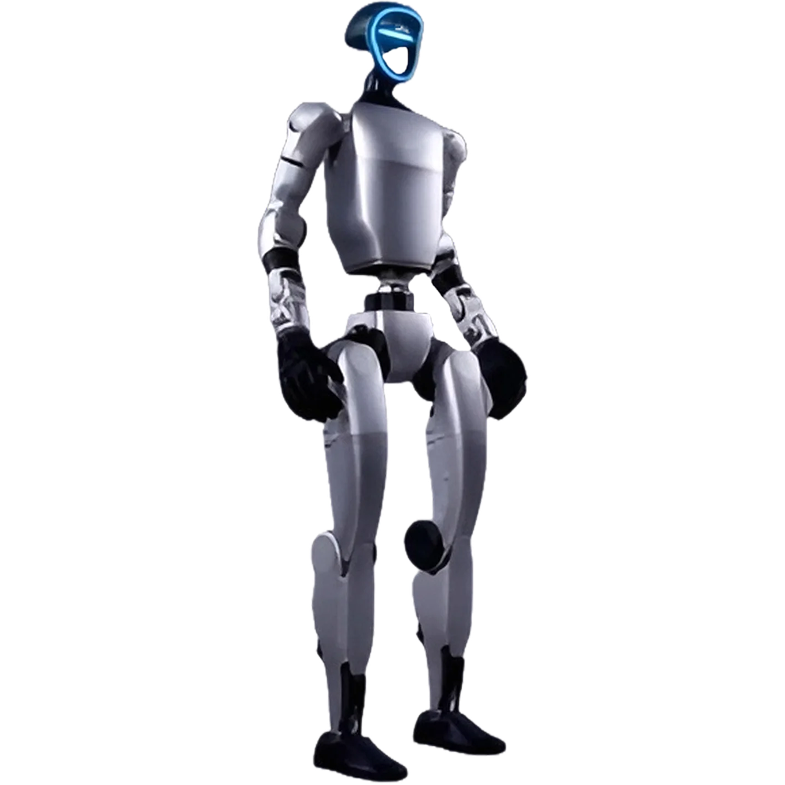
This compact educational robot measures 1270 × 450 × 200 mm (approx. 4.1 ft), weighs about 35 kg, carries light payloads, and can reach speeds up to 2 m/s—ideal for lively classroom demos.
LIVOX-MID360
Shoulder: 3 | Elbow: 2 | Wrist: 2 (+2 optional) | Optional 3-Fingered Dexterous Hand
NVIDIA Jetson Orin (optional)
Max Torque: 120 N·m (Knee Joint)
Intel Realsense D435
9000mAh – Provides lasting power
No external cables
Hip: 3 | Knee: 2 | Ankle: 2
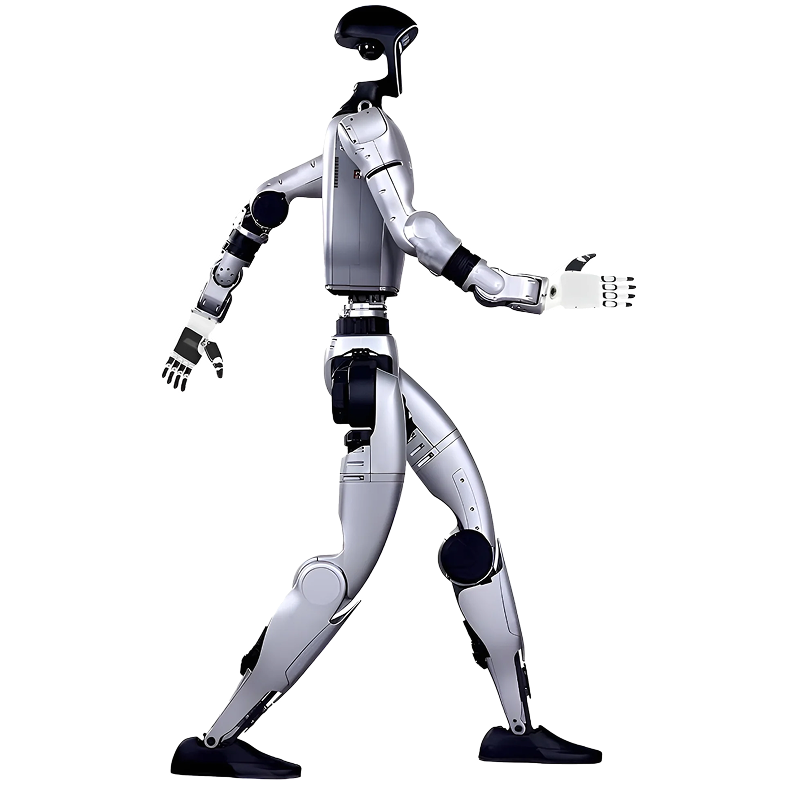
Advanced educational humanoid with optional three‑finger hands, extra wrist and waist freedom, and stronger 120 N·m knee torque. Optional NVIDIA Jetson Orin boosts computing for higher-level research.
LIVOX-MID360 + Improved Scan Range
Optional 5-Finger Hand | Higher Precision Force Control
Intel Realsense D455
10,500mAh – Extended runtime
Extends U1 with a 10,500mAh battery, upgraded AI modules, and more flexible joints—built for intensive coursework and real-world robotics contests.
Stereo + Depth + Wide FOV SLAM Cameras
Dynamic Walking Algorithms + Terrain Adaptation
Adds advanced locomotion control, multi-camera SLAM vision, and reinforced joints to endure demanding research environments.
Force & Tactile Feedback for Hands
Integrated Jetson Orin NX
Integrates Jetson Orin NX, brings haptic feedback for hand control, and supports cloud-based simulation training.
Multi-Camera Body Tracking
Natural Language Processing Integration
Focuses on collaborative research with voice AI, advanced gesture recognition, and richer human–robot interaction modules.
Cloud + Edge Processing for Autonomous Learning
Collision Avoidance + Human Proximity Sensors
Flagship EDU model combining all upgrades with AI-driven decision making, cloud–edge hybrid control, and maximum safety for lab and competition deployment.
Height, Width and Thickness(Stand)
1320x450x200mm
Height, Width and Thickness(Fold)
690x450x300mm
Weight (With Battery)
About 35kg
Total Degrees of Freedom(Joint Freedom)
23
Single Leg Degrees of Freedom
6
Waist Degrees of Freedom
1
Single Arm Degrees of Freedom
5
Single Hand Degrees of Freedom
/
Joint output bearing
Industrial grade crossed roller bearings (high precision, high load capacity)
Joint motor
Low inertia high-speed internal rotor PMSM(permanent magnet synchronous motor,better response speed and heat dissipation)
Maximum Torque of Knee Joint【1】
90N.m
Arm Maximum Load【2】
About 2Kg
Calf + Thigh Length
0.6M
Arm Span
About 0.45M
Extra Large Joint Movement Space
Waist joint:Z±155° Knee joint:0~165° Hip joint:P±154°、R-30~+170°、Y±158°
Full Joint Hollow Electrical Routing
YES
Joint Encoder
Dual encoder
Cooling System
Local air cooling
Power Supply
13 string lithium battery
Basic Computing Power
8-core high-performance CPU
Sensing Sensor
Depth Camera+3D LiDAR
4 Microphone Array
YES
5W Speaker
YES
WiFi 6 、Bluetooth 5.2
YES
High Computing Power Module
/
Smart Battery (Quick Release)
9000mAh
Charger
54V 5A
Manual Controller
YES
Battery Life
About 2h
Upgraded Intelligent OTA
YES
Secondary Development【3】
/
Warranty Period【4】
6 months
Price(Tax and Shipping cost excluded)
Contact sales

Height, Width and Thickness(Stand)
1320x450x200mm
Height, Width and Thickness(Fold)
690x450x300mm
Weight (With Battery)
About 35kg+
Total Degrees of Freedom(Joint Freedom)
23 – 43
Single Leg Degrees of Freedom
6
Waist Degrees of Freedom
1+(Optional 2 additional waist degrees of freedom)
Single Arm Degrees of Freedom
5
Single Hand Degrees of Freedom
7(Optional Force control of three-fingered hand)+2(Optional 2 additional wrist degrees of freedom)
Joint output bearing
Industrial grade crossed roller bearings (high precision, high load capacity)
Joint motor
Low inertia high-speed internal rotor PMSM(permanent magnet synchronous motor,better response speed and heat dissipation)
Maximum Torque of Knee Joint【1】
120N.m
Arm Maximum Load【2】
About 3Kg
Calf + Thigh Length
0.6M
Arm Span
About 0.45M
Extra Large Joint Movement Space
Waist joint:Z±155°、X±45°、Y±30° Knee joint:0~165° Hip joint:P±154°、R-30~+170°、Y±158° Wrist joint:P±92.5°、Y±92.5°
Full Joint Hollow Electrical Routing
YES
Joint Encoder
Dual encoder
Cooling System
Local air cooling
Power Supply
13 string lithium battery
Basic Computing Power
8-core high-performance CPU
Sensing Sensor
Depth Camera+3D LiDAR
4 Microphone Array
YES
5W Speaker
YES
WiFi 6 、Bluetooth 5.2
YES
High Computing Power Module
NVIDIA Jetson Orin
Smart Battery (Quick Release)
9000mAh
Charger
54V 5A
Manual Controller
YES
Battery Life
About 2h
Upgraded Intelligent OTA
YES
Secondary Development【3】
YES
Warranty Period【4】
12 months
Price(Tax and Shipping cost excluded)
Contact sales
Let us know what challenges you are trying to solve so we can help.
Leading the MET (Mechatronics, Engineering & Technology) educational revolution by integrating robotics and real-world innovation into learning.
Empowering institutions to build future-ready talent through advanced automation solutions.



